|
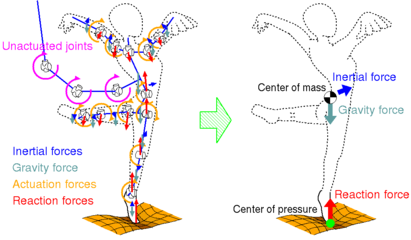
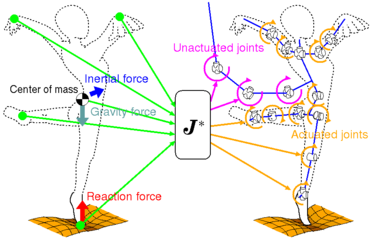
分解重心速度制御
大自由度な身体の運動も、重心と反力中心(ZMP)に着目することで低次元化できます。
これに基づき、重心の慣性行列(重心ヤコビ行列)を用いて比較的少ない計算量で力学的に整合する全身運動を合成する枠組を開発しています。
- R. K. Sato and T. Sugihara, Walking Control for Feasibility at Limit of Kinematics Based on Virtual Leader-Follower, 2017 IEEE-RAS International Conference on Humanoid Robots, 718-723, 2017.
- 杉原知道, 中村仁彦, 非駆動自由度の陰表現を含んだ重心ヤコビアンによる脚型ロボットの全身協調反力操作, 日本ロボット学会誌, 24(2):222-231, 2006.
- T. Sugihara and Y. Nakamura, Whole-body Cooperative COG Control through ZMP Manipulation for Humanoid Robots, 2nd International Symposium on Adaptive Motion of Animals and Machines, SaP-III-4, 2003.
|

|
ロバスト逆運動学
重心を含む身体各部の所望の運動を全身関節運動に分解する逆運動学アルゴリズムを開発しています。
厳密解が存在しない場合であっても、解が無数に存在する場合であっても、ロバストに最小二乗解を求めることができます。
- T. Sugihara, Robust Solution of Prioritized Inverse Kinematics Based on Hestenes-Powell Multiplier Method, 2014 IEEE/RSJ International Conference on Intelligent Robots and Systems, 510-515, 2014.
- T. Sugihara, Solvability-Unconcerned Inverse Kinematics by the Levenberg-Marquardt Method, IEEE Transaction on Robotics, 27(5):984-991, 2011.
|
|
順動力学
ロボットと多数の物体が相互作用する状況を、立体計算に基づいて安定かつ高速にシミュレートするための計算アルゴリズムを開発しています。
モータ・ギアの摩擦も考慮しています。
- 張凱, 脇坂尚樹, 杉原知道, 干渉立体を用いた剛体接触力計算の部分分解と反復による高速化, 日本機械学会ロボティクス・メカトロニクス講演会2019, 2P1-D07, 2019.
- N. Wakisaka and T. Sugihara, Loosely-constrained Volumetric Contact Force Computation For Rigid Body Simulation, 2017 IEEE/RSJ International Conference on Intelligent Robots and Systems, 6428-6433, 2017.
- N. Wakisaka, R. Kikuuwe and T. Sugihara, Fast Forward Dynamics Simulation of Robot Manipulators with Highly Frictional Gears, 2016 IEEE International Conference on Robotics and Automation, 2096-2101, 2016.
- N. Wakisaka and T. Sugihara, Fast and Reasonable Contact Force Computation in Forward Dynamics Based on Momentum-Level Penetration Compensation, 2014 IEEE/RSJ International Conference on Intelligent Robots and Systems, 2434-2439, 2014.
|
|
土の運動計算
ロボットと相互作用する地盤(土)の変形を高速にシミュレートするためのアルゴリズムを開発しています。
- 鈴木健元, 杉原知道, 沈下と排土抵抗の重ね合わせに基づく土質力学シミュレーション, 日本機械学会ロボティクス・メカトロニクス講演会2018, 2A1-K05, 2018.
|
|
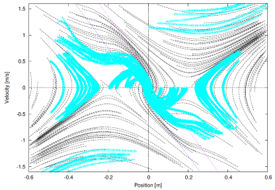
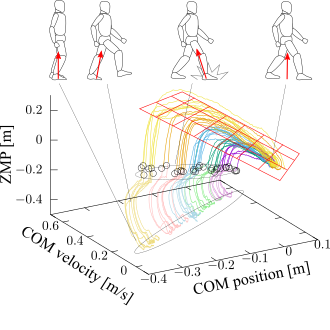
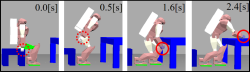
二脚運動制御
重心-ZMPモデルに基づき、詳細な目標運動軌道の計画が不要な二脚動作制御を研究しています。
制御器の変化によって様々な動作を自在に遷移できる枠組を提案しています。
- T. Yamamoto and T. Sugihara, Foot-guided control of a biped robot through ZMP manipulation, Advanced Robotics, 34(21-22):1472-1489, 2020.
- K. Imanishi and T. Sugihara, Autonomous Biped Stepping Control Based on the LIPM Potential, 2018 IEEE-RAS International Conference on Humanoid Robots, 593-598, 2018.
- H. Atsuta and T. Sugihara, 2D Omnidirectional Navigation of a Biped Robot Based on an Egocentric Orbit Following, 2017 IEEE/RSJ International Conference on Intelligent Robots and Systems, 5257-5262, 2017.
- T. Sugihara and T. Yamamoto, Foot-guided Agile Control of a Biped Robot through ZMP Manipulation, 2017 IEEE/RSJ International Conference on Intelligent Robots and Systems, 4546-4551, 2017.
- H. Atsuta, H. Nozaki and T. Sugihara, Smooth-Path-Tracking Control of a Biped Robot at Variable Speed Based on Dynamics Morphing, 2017 IEEE International Conference on Robotics and Automation, 4116-4121, 2017.
- 野崎晴基, 杉原知道, 地形に合わせた二脚ロボットのための重心誘導型制御と運足誘導型制御の遷移, 日本機械学会ロボティクス・メカトロニクス講演会2016, 2A1-12b4, 2016.
- H. Atsuta and T. Sugihara, Dynamics Morphing between Standing and Repetitive Hopping of Biped Robots, 2015 IEEE International Conference on Robotics and Automation, 5704-5709, 2015.
- H. Atsuta and T. Sugihara, Sideward Locomotion Control of Biped Robots Based on Dynamics Morphing, 2014 IEEE/RSJ International Conference on Intelligent Robots and Systems, 959-964, 2014.
- 石黒康裕, 杉原知道, 人型ロボットの手足支持を用いたダイナミックな3次元的移動, 日本機械学会ロボティクス・メカトロニクス講演会2014, 3P1-E06, 2014.
- T. Sugihara, Reflexive Step-out Control Superposed on Standing Stabilization of Biped Robots, 2012 IEEE-RAS International Conference on Humanoid Robots, 741-746, 2012.
- T. Sugihara, Biped Control To Follow Arbitrary Referential Longitudinal Velocity based on Dynamics Morphing, 2012 IEEE/RSJ International Conference on Intelligent Robots and Systems, 1892-1897, 2012.
- T. Sugihara, Consistent Biped Step Control with COM-ZMP Oscillation Based on Successive Phase Estimation in Dynamics Morphing, 2010 IEEE International Conference on Robotics and Automation, 4224-4229, 2010.
- T. Sugihara, Dynamics Morphing from Regulator to Oscillator on Bipedal Control, 2009 IEEE/RSJ International Conference on Intelligent Robots and Systems, 2940-2945, 2009.
- T. Sugihara, Standing Stabilizability and Stepping Maneuver in Planar Bipedalism based on the Best COM-ZMP Regulator, 2009 IEEE International Conference on Robotics and Automation, 1966-1971, 2009.
- 杉原知道, 中村仁彦, ZMP-重心モデルと台車型倒立振子モデルのアナロジーによるヒューマノイドロボットの高機動化制御, 日本ロボット学会誌, Vol.24, No.1, pp.74-83, 2006.
- T. Sugihara, Y. Nakamura and H. Inoue, Realtime Humanoid Motion Generation through ZMP Manipulation based on Inverted Pendulum Control, 2002 IEEE International Conference on Robotics and Automation, pp. 1404-1409, 2002.
|
|
二脚運動状態推定
慣性センサおよび力センサから取得される情報と、各種運動学・力学モデルに基づき、ロボットの胴体傾斜角、並進移動量、重心運動を複合的に高精度に推定する技術を開発しています。
- K. Masuya and T. Sugihara, COM Motion Estimation of a Biped Robot Based on Kinodynamics and Torque Equilibrium, Advanced Robotics, 30(10):691-703, 2016.
- K. Masuya and T. Sugihara, Dead reckoning for biped robots that suffers less from foot contact condition based on anchoring pivot estimation, Advanced Robotics, 29(12):785-799, 2015.
|
|
|
腕運動制御
人のように滑らかな速度履歴を示し、摂動をしなやかに受け流す到達運動を自在に開始/停止できる制御器を開発しています。
- F. Seto and T. Sugihara, Nonlinear Reference Shaping with Endpoint Position Feedback for Large Acceleration Avoidance in Reaching Movement, Journal of Robotics and Mechatronics, 22(2):173-178, 2010.
- F. Seto and T. Sugihara, Motion Control with Slow and Rapid Adaptation for Smooth Reaching Movement Under External Force Disturbance, 2010 IEEE/RSJ International Conference on Intelligent Robots and Systems, 1650-1655, 2010.
- F. Seto and T. Sugihara, Online Nonlinear Reference Shaping with End-point Position Feedback for Human-Like Smooth Reaching Motion, 2009 IEEE-RAS International Conference on Humanoid Robots, 297-302, 2009.
- F. Seto and T. Sugihara, Online Reference Shaping with End-point Position Feedback for Large Acceleration Avoidance on Manipulator Control, 2009 IEEE/RSJ International Conference on Intelligent Robots and Systems, 5743-5748, 2009.
|
|
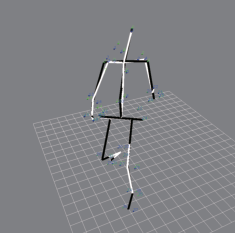
モーションキャプチャからの高精度運動復元
光学式モーションキャプチャデータから、人の身体寸法とマーカ貼付位置を推定し、それに基づいて全身運動を高精度に復元する技術を開発しています。特に肩のような複合関節において、精度に顕著な差異が見られます。
- T. Zou and T. Sugihara, Toward on-line fitting of a human skeleton-marker model for accurate motion tracking, The 8th IEEE RAS/EMBS International Conference on Biomedical Robotics and Biomechatronics, pp. 219-224, 2020.
- T. Zou and T. Sugihara, Fast identification of a human skeleton-marker model for motion capture system using stochastic gradient descent method, The 8th IEEE RAS/EMBS International Conference on Biomedical Robotics and Biomechatronics, pp. 188-193, 2020.
|

|
立位運動制御器同定
ロボットの立位制御器が人の制御器のモデルとなるという仮説の下、運動計測データから制御パラメータを同定し、仮説が支持される結果を得ています。直接計測の難しい、人の平衡感覚や反射神経を評価することに役立ちます。
- N. Murai and T. Sugihara, Identification of COM Control Behavior of a Human in Stance as a Dynamical System, The 8th IEEE RAS/EMBS International Conference on Biomedical Robotics and Biomechatronics, pp. 95-100, 2020.
- D. Kaneta, N. Murai and T. Sugihara, Reassessment of COM-ZMP Model for the Identification of Lateral Standing Controller of a Human, 2013 IEEE/RSJ International Conference on Intelligent Robots and Systems, 2351-2356, 2013.
- N. Murai, D. Kaneta and T. Sugihara, Identification of a Piecewise Controller of Lateral Human Standing Based on Returning Recursive-Least-Square Method, 2013 IEEE/RSJ International Conference on Intelligent Robots and Systems, 96-101, 2013.
- D. Kaneta, N. Murai and T. Sugihara, Visualization and Identification of Macroscopic Dynamics of a Human Motor Control Based on the Motion Measurement, 2012 IEEE-RAS International Conference on Humanoid Robots, 767-772, 2012.
|
|
踏み出し運動制御器同定
人の歩行制御においてもロボットの制御器がモデルとなるという仮説を立て、それが支持される結果を得ています。
制御パラメータは初動軌跡のみから推定できるので、歩行支援機の開発に役立ちます。
- M. Kojima and T. Sugihara, Identification of a Step-and-Brake Controller of a Human Based on COM-ZMP Model and Terminal Capturability Condition, The 8th IEEE RAS/EMBS International Conference on Biomedical Robotics and Biomechatronics, pp. 165-170, 2020.
|

|
力学変容に基づく行動遷移
力学系として設計した各動作の制御器を介した遷移可能性に基づいて、接続関係を抽出し、ロボット自身が制御器の遷移を自動計画できるようにする枠組を提案しています。
- 熱田洋史, 杉原知道, 力学変容系における制御器の隣接関係に基づく二脚ロボットの自動動作遷移, 第17回計測自動制御学会システムインテグレーション部門講演会, 1C3-4, 2016.
|
|
SLAM-SEAN
ロボットが未知環境内を高効率に探索し目的地に到達するためのコンセプトであるSEAN(Simultaneous Exploration And Navigation)を提案し、SLAM(Simultaneous Localization And Mapping)と統合したシステムを開発しています。
- J. Zuo, T. Yamamoto, T. Sugihara, SLAM-SEAN for Higher Autonomy of Mobile Robots in Unknown Environment, 日本機械学会ロボティクス・メカトロニクス講演会2020, 2P1-K15, 2020.
- 山本南, 杉原知道, 停留点を生じないポテンシャル場の動的計算による移動ロボットの効率的未知環境内探索と誘導, 第34回日本ロボット学会学術講演会, 1C1-05, 2016.
|
|
包摂的二脚移動制御
外界計測・地図作成・経路計画・全身制御をリアルタイムコンカレントに行う、状況変化や摂動に対してロバストな二脚ロボットの誘導制御システムを開発しています。
- 山本孝信, 杉原知道, 外界や目的地の変動に低感度な二脚ロボットの移動経路計画, 第36回日本ロボット学会学術講演会, 1J2-06, 2018.
- 山本孝信, 杉原知道, 離散・連続制御の併用による二脚ロボットの半自律的凹凸地面上誘導, 第22回ロボティクスシンポジア, 177-182, 2017.
- 山本孝信, 杉原知道, 法線情報を持つ地形マップを用いた二脚ロボットの即時誘導, 第35回日本ロボット学会学術講演会, 3L2-02, 2017.
- 山本孝信, 杉原知道, 即応的離散・連続制御の併用による二脚ロボットのロバスト誘導システム, 第17回計測自動制御学会システムインテグレーション部門講演会, 1C3-3, 2016.
- H. Kobayashi and T. Sugihara, Self-consistent Automatic Navigation of COM and Feet for Realtime Humanoid Robot Steering, 2009 IEEE/RSJ International Conference on Intelligent Robots and Systems, 3525-3530, 2009.
|
|
二脚動作軌道の高速計画
重心-ZMPモデルに基づく微分方程式の解析解を用いて、足踏み替えを自在に行う動作軌道を高速に求める計算方法を提案しました。
- T. Sugihara and Y. Nakamura, Boundary Condition Relaxation Method for Stepwise Pedipulation Planning of Biped Robots, IEEE Transaction on Robotics, 25(3):658-669, 2009.
- K. Yamamoto, T. Sugihara and Y. Nakamura, Gait Planning including Toe Contact with Boundary Condition Relaxation, The 17th CISM-IFToMM Symposium (RoManSy17), 409-416, 2008.
- T. Sugihara and Y. Nakamura, Enhancement of Boundary Condition Relaxation Method for 3D Hopping Motion Planning of Biped Robots, 2007 IEEE/RSJ International Conference on Intelligent Robots and Systems, 444-449, 2007.
- 寺田耕志, 杉原知道, 國吉康夫, 境界条件緩和と運動方程式の力学的三次元対称化による二脚ロボットのオンライン運動計画法, 第25回日本ロボット学会学術講演会, 1G26, 2007.
|
|
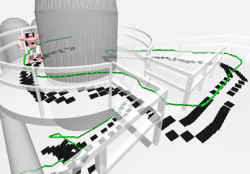
複雑環境内経路計画
大規模構造物内を移動する経路を、環境の局所的粗密に探索空間を適合させることで効率的に計画する方法を開発しています。
- T. Nishi and T. Sugihara, Motion Planning of a Humanoid Robot in a Complex Environment Using RRT and Spatiotemporal Post-Processing Techniques, International Journal of Humanoid Robotics, 11(2):14410035-1-35, 2014.
- 清水康志, 杉原知道, 複雑度適合法による人型ロボットの大規模環境内長距離経路計画, 第31回日本ロボット学会学術講演会, 1C1-08, 2013.
- Y. Shimizu and T. Sugihara, Efficient Path Planning of Humanoid Robots with Automatic Conformation of Body Representation to the Complexity of Environments, 2012 IEEE-RAS International Conference on Humanoid Robots, 755-760, 2012.
- 清水康志, 杉原知道, 人型ロボットの段階的経路計画に伴う小範囲干渉の局所的解消, 日本ロボット学会第30回記念学術講演会, 4K3-8, 2012.
|
|
インタラクティブ動作設計
動作を特徴づける幾つかの姿勢を、環境との接触や自己干渉を自動解決しながらインタラクティブに作成し、それを自動補間して実行可能な軌道を高速に作成する技術を開発しています。
- 田中健也, 杉原知道, NURBSによる人型ロボットのインタラクティブ動作設計 II: 環境との3次元的接触を伴う動作の高速設計, 第34回日本ロボット学会学術講演会, 3Y1-08, 2016.
- 田中健也, 杉原知道, NURBSによる人型ロボットのインタラクティブ動作設計 I: NURBSの構造を用いたZMP制約を満たす高速軌道修正, 第34回日本ロボット学会学術講演会, 3Y1-07, 2016.
- 松本恭典, 杉原知道, 人型ロボットのインタラクティブ動作設計における干渉の自動解決, 第31回日本ロボット学会学術講演会, 1C3-05, 2013.
- 松本恭典, 杉原知道, 人型ロボットのインタラクティブ姿勢編集における干渉の自動解決, 日本機械学会ロボティクス・メカトロニクス講演会2013, 2P1-A11, 2013.
- 松本恭典, 杉原知道, 人型ロボットのインタラクティブ動作設計における運動拘束条件の自動整合, 日本機械学会ロボティクス・メカトロニクス講演会'12, 1A2-O04, 2012.
|

|
ミメティックコミュニケーション
相対する人の動きから意図を推定し数百ミリ秒周期で適切に応答する、非言語コミュニケーションシステムを開発しました。
- 高野渉, 山根克, 杉原知道, 山本江, 中村仁彦, 身体的記号化モデルに基づく人間とヒューマノイドロボットのコミュニケーション理論, 日本ロボット学会誌, 28(6):735-745, 2010.
- 高野渉, 山根克, 杉原知道, 山本江, 中村仁彦, 運動パターンの記号化に基づく原始的コミュニケーションモデルを用いた人間とロボットのインターラクティブコンテンツ, 第2回デジタルコンテンツシンポジウム, 4-2, 2006.
- W. Takano, K. Yamane, T. Sugihara, K. Yamamoto and Y. Nakamura, Primitive Communication based on Motion Recognition and Generation with Hierarchical Mimesis Model, 2006 IEEE International Conference on Robotics and Automation, 3602-3609, 2006.
- T. Sugihara, W. Takano, K. Yamane, K. Yamamoto and Y. Nakamura, Online Dynamical Retouch of Motion Patterns Towards Animatronic Humanoid Robots, 2005 IEEE-RAS International Conference on Humanoid Robots, 117-122, 2005.
- T. Sugihara, K. Yamamoto, W. Takano, K. Yamane and Y. Nakamura, Animatronic Humanoid Robot System That Responsively Interacts with Humans, 36th International Symposium on Robotics, 2005.
|
|
トルクセンサ開発
トーションバーと光学素子を組み合わせた比較的安価なトルクセンサを開発しています。
- 杉原知道, 加藤達彦, トルクセンサ, 特願2018-080896.
- 加藤達彦, 石川省吾, 杉原知道, 軸受によるトルクセンシングユニットの他軸干渉低減, 日本機械学会ロボティクス・メカトロニクス講演会2016, 1A2-20a2, 2016.
- 西尾政紀, 石川省吾, 杉原知道, 減速機内部摩擦補償のための光学センサを用いた安価なトルクセンサ, 日本機械学会ロボティクス・メカトロニクス講演会2015, 2A1-B08, 2015.
|
|
バックドライバブルモータ制御
100倍以上の減速比を持つ減速機の内部摩擦を、比較的安価なトルクセンサを用いて補償し、摂動に対して柔軟に振る舞うロボットモータ制御ユニットを開発しています。
- 加藤匡裕, 杉原知道, 柔軟さと高精度位置決めを両立するロボットアームの可変損失補償制御, 日本機械学会ロボティクス・メカトロニクス講演会2019, 2A2-C08, 2019.
- 杉原知道, 石川省吾, モータ制御装置及びモータ制御方法, 特開2016-039737.
- S. Ishikawa, M. Nishio and T. Sugihara, Low-cost Backdrivable Motor Control Based on Feed-forward/Feed-back Friction Compensation, 2015 IEEE International Conference on Robotics and Automation, 5026-5031, 2015.
|
|
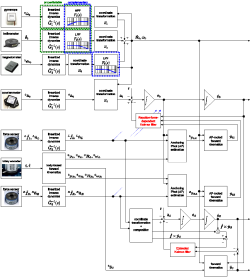
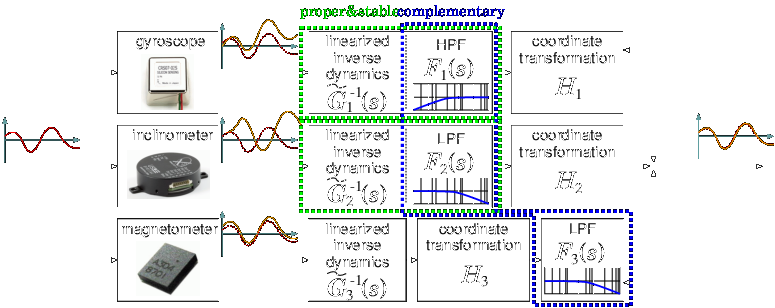
高速・高精度姿勢推定
レートジャイロ・傾斜計・磁気センサを、それぞれの周波数特性を補償した上で相補的に組み合わせ、不規則変化する移動体の姿勢を高精度に推定する技術を開発しています。
- K. Masuya and T. Sugihara, A Nonlinear Complementary Filter for Attitude Estimation with Dynamics Compensation of MARG Sensor,
2016 IEEE International Conference on Advanced Intelligent Mechatronics, 976-981, 2016.
- 杉原知道, 舛屋賢, 山本元司, 三次元高精度姿勢推定のための慣性センサの線形・非線形特性分離に基づいた相補フィルタ, 日本ロボット学会誌, 31(3):251-262, 2013.
- 杉原知道, 舛屋賢, 姿勢推定装置, 特開2012-198057.
- K. Masuya, T. Sugihara and M. Yamamoto, Design of Complementary Filter for High-fidelity Attitude Estimation based on Sensor Dynamics Compensation with Decoupled Properties, 2012 IEEE International Conference on Robotics and Automation, 606-611, 2012.
|
|
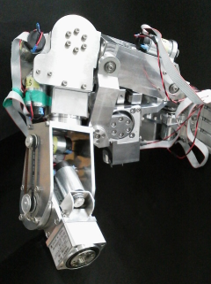
ロボット上腕機構
肩甲骨の複合的な運動を、比較的単純な構成で再現する上腕機構を開発しています。
- 寺本隆慶, 杉原知道, 高い支持剛性と広い作業領域を両立する人型ロボットの5自由度肩機構, 日本機械学会ロボティクス・メカトロニクス講演会2015, 1P2-C03, 2015.
|

|
ロボット腰機構
理論的には自由度が零でありながら2方向に大傾斜できる、耐荷重の大きさと可動性を両立したパラレル機構を開発しています。
- 影山将也, 杉原知道, ニューラルネットワークを用いた可動する零自由度機構の運動計算, 日本機械学会ロボティクス・メカトロニクス講演会2019, 2A2-F07, 2019.
- 杉原知道, 能美承太郎, 可動する零自由度機構の解析, 第23回ロボティクスシンポジア, 松風閣, 85-90, 2018.
- 下口紘輝, 杉原知道, 3-UUパラレルメカニズムのバックラッシュ低減化, 日本機械学会ロボティクス・メカトロニクス講演会2016, 2P2-13b2, 2016.
- 鹿田憲吾, 舛屋賢, 杉原知道, 2方向に大傾斜が可能な零自由度3-UUパラレルメカニズム, 日本機械学会ロボティクス・メカトロニクス講演会2014, 3P2-K02, 2014.
|

|
ロボット下腿機構
立脚相では硬く、遊脚相では柔らかく振る舞うよう、姿勢に応じて減速比が自然に変化する膝-足首複合下腿機構を開発しています。
- 鈴江卓也, 杉原知道, 抗/従重力の自然な遷移と足首の回内・回外が可能な人型ロボットの複合下腿機構, 日本機械学会ロボティクス・メカトロニクス講演会2019, 1A1-J05, 2019.
- 杉原知道, 東田直樹, 舛屋賢, 2関節連動変速リンク機構, 特開2016-209983.
- 東田直樹, 舛屋賢, 杉原知道, 膝と足首の連動により変速する人型ロボットの下腿機構, 日本機械学会ロボティクス・メカトロニクス講演会2015, 2A2-P08, 2015.
|

|
ロボット足機構
高剛性部材だけで構成されているにも関わらず、地面との衝突時には剛性・粘性ともに零となって衝撃を吸収し、かつ接触後には部材自体の剛性と同程度の硬さを取り戻す足機構を開発しています。
- 山崎大, 杉原知道, 衝撃吸収と安定接触を両立する足機構における塑性変形の効果, 日本機械学会ロボティクス・メカトロニクス講演会2014, 1A1-R01, 2014.
- 山崎大, 杉原知道, 衝撃吸収と支持剛性を両立する人型ロボットの足機構, 日本機械学会ロボティクス・メカトロニクス講演会2013, 1A2-P06, 2013.
|
|
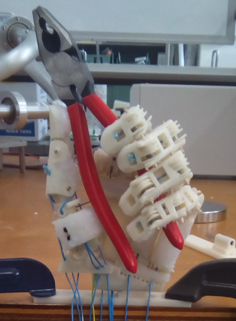
人型ロボットハンド
人の手の運動計測データから復元した最尤な関節配置を持ち、複雑な物体把持や手内操作を可能とする5指ハンド機構を開発しています。
- H. Tani, R. Nozawa and T. Sugihara, Identification of a Human Hand Kinematics by Measuring and Merging of Nail-Based Finger Motions, 2020 IEEE/RSJ International Conference on Intelligent Robots and Systems, pp.9220-9225, 2020.
- 谷英紀, 野澤崚, 杉原知道, 人の運動特性を再現するロボットハンド機構の試作と評価, 日本機械学会ロボティクス・メカトロニクス講演会2019, 2A2-G09, 2019.
- 谷英紀, 杉原知道, 運動計測による全指爪位置を基準とした人の手の関節配置同定, 第36回日本ロボット学会学術講演会, 1B1-01, 2018.
- 谷英紀, 杉原知道, 人型ロボットハンド設計に向けた母指CMC関節の運動学同定, 日本機械学会ロボティクス・メカトロニクス講演会2017, 2P1-D10, 2017.
|

|
等身大人型ロボット(左から)H5、H6、H7の開発に携わりました。
- S. Kagami, K. Nishiwaki, J. J. Kuffner, T. Sugihara, M. Inaba and H. Inoue, Design, Implementation and Remote Operation of the Humanoid H6, In Experimental Robotics VII, Lecture Notes in Control and Information Sciences 271, 41-50, Springer-Verlag., 2001.
- S. Kagami, J. J. Kuffner, K. Nishiwaki, T. Sugihara, T. Michikata, T. Aoyama, M. Inaba and H. Inoue, Design and Implementation of Remotely Operation Interface for Humanoid Robot, 2001 IEEE International Conference on Robotics and Automation, 401-406, 2001.
- S. Kagami, K. Nishiwaki, T. Sugihara, J. J. Kuffner, M. Inaba and H. Inoue, Design and Implementation of Software Research Platform for Humanoid Robotics : H6, 2001 IEEE International Conference on Robotics and Automation, 2431-2436, 2001.
- K. Nishiwaki, T. Sugihara, S. Kagami, F. Kanehiro, M. Inaba and H. Inoue, Design and Development of Research Platform for Perception-Action Integration in Humanoid Robot : H6, 2000 IEEE/RSJ International Conference on Intelligent Robots and Systems, 1559-1564, 2000.
- 長阪憲一郎, 近野敦, 西脇光一, 北川知伸, 杉原知道, 稲葉雅幸, 井上博允, ダイナミックヒューマノイドH5の開発, 第16回日本ロボット学会学術講演会, pp.837-838, 1998.
|

|
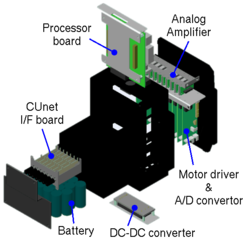
小型人型ロボット(左から)mighty、magnumを開発しました。
このために、ポータブルロボット制御ユニットAnimatoCoreを開発しました。
- T. Sugihara, K. Yamamoto and Y. Nakamura, Hardware design of high performance miniature anthropomorphic robots, Robotics and Autonomous System, 56(1):82-94, 2007.
- T. Sugihara, K. Yamamoto and Y. Nakamura, Architectural Design of Miniature Anthropomorphic Robots Towards High-Mobility, 2005 IEEE/RSJ International Conference on Intelligent Robots and Systems, 1083-1088, 2005.
|
|
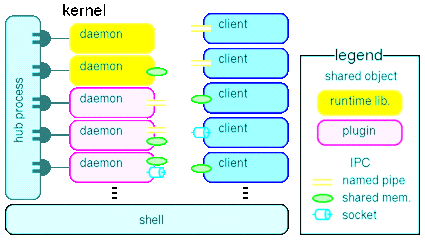
プラグインアーキテクチャを用いて、ユニークなロボットデータへのアクセシビリティを機能に応じて変えられる、拡張が容易なソフトウェアシステムのフレームワークを提案しています。
- 杉原知道, 擬似マイクロカーネルに基づく成長型ロボットソフトウェアアーキテクチャ, 日本機械学会ロボティクス・メカトロニクス講演会, 2P1-F05, 2008.
|