|
Resolved COM rate control
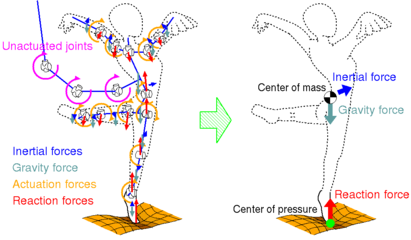
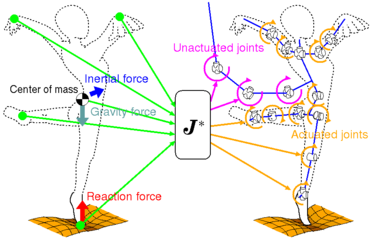
The body dynamics with many degrees-of-freedom can be reduced by focusing on the center of mass (COM) and the zero-moment point (ZMP).
Based on this idea, we developed a framework to synthesize the whole-body motion that is dynamically consistent with rather small amount of computation using the COM Jacobian matrix.
- R. K. Sato and T. Sugihara, Walking Control for Feasibility at Limit of Kinematics Based on Virtual Leader-Follower, 2017 IEEE-RAS International Conference on Humanoid Robots, 718-723, 2017.
- T. Sugihara and Y. Nakamura, Whole-body Cooperative Reaction Force Manipulation on Legged Robots with COG Jacobian involving Implicit Representation of Unactuated Coordinates (in Japanese), Journal of Robotics Society of Japan, 24(2):222-231, 2006.
- T. Sugihara and Y. Nakamura, Whole-body Cooperative COG Control through ZMP Manipulation for Humanoid Robots, 2nd International Symposium on Adaptive Motion of Animals and Machines, SaP-III-4, 2003.
|

|
Robust inverse kinematics
We study the inverse kinematics algorithm to resolve the desired motions of body parts including COM into the whole joint movements.
Our algorithm can provide the least-square solution robustly even in the cases where the strict solution does not exist or an infinite number of solutions exist.
- T. Sugihara, Robust Solution of Prioritized Inverse Kinematics Based on Hestenes-Powell Multiplier Method, 2014 IEEE/RSJ International Conference on Intelligent Robots and Systems, 510-515, 2014.
- T. Sugihara, Solvability-Unconcerned Inverse Kinematics by the Levenberg-Marquardt Method, IEEE Transaction on Robotics, 27(5):984-991, 2011.
|
|
Forward dynamics
We developed fast and stable algorithms to simulate situations where a number of rigid bodies including robots interact with each other based on solid computations.
Friction in motors and gears were also taken into account.
- K. Zhang, N. Wakisaka and T. Sugihara, A fast volumetric contact force computation of rigid bodies by decomposition and iteration, 2019 JSME Conference on Robotics and Mechatronics, 2P1-D07, 2019.
- N. Wakisaka and T. Sugihara, Loosely-constrained Volumetric Contact Force Computation For Rigid Body Simulation, 2017 IEEE/RSJ International Conference on Intelligent Robots and Systems, 6428-6433, 2017.
- N. Wakisaka, R. Kikuuwe and T. Sugihara, Fast Forward Dynamics Simulation of Robot Manipulators with Highly Frictional Gears, 2016 IEEE International Conference on Robotics and Automation, 2096-2101, 2016.
- N. Wakisaka and T. Sugihara, Fast and Reasonable Contact Force Computation in Forward Dynamics Based on Momentum-Level Penetration Compensation, 2014 IEEE/RSJ International Conference on Intelligent Robots and Systems, 2434-2439, 2014.
|
|
Soil mechanics
We developed algorithms to simulate deformation of soil that interact with robots in reasonable time.
- T. Suzuki and T. Sugihara, Soil Mechanics Simulation Based On Superposition of Subsidence and Bulldozing Resistance, 2018 JSME Conference on Robotics and Mechatronics, 2A1-K05, 2018.
|
|
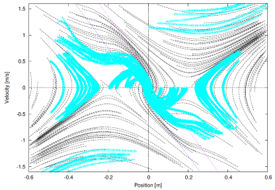
Biped motion control
We study biped motion control that does not require fine trajectory planning based on the COM-ZMP model.
We also propose a framework in which the robot can seamlessly transition various motions through morphing of the controller.
- T. Yamamoto and T. Sugihara, Foot-guided control of a biped robot through ZMP manipulation, Advanced Robotics, 34(21-22):1472-1489, 2020.
- K. Imanishi and T. Sugihara, Autonomous Biped Stepping Control Based on the LIPM Potential, 2018 IEEE-RAS International Conference on Humanoid Robots, 593-598, 2018.
- H. Atsuta and T. Sugihara, 2D Omnidirectional Navigation of a Biped Robot Based on an Egocentric Orbit Following, 2017 IEEE/RSJ International Conference on Intelligent Robots and Systems, 5257-5262, 2017.
- T. Sugihara and T. Yamamoto, Foot-guided Agile Control of a Biped Robot through ZMP Manipulation, 2017 IEEE/RSJ International Conference on Intelligent Robots and Systems, 4546-4551, 2017.
- H. Atsuta, H. Nozaki and T. Sugihara, Smooth-Path-Tracking Control of a Biped Robot at Variable Speed Based on Dynamics Morphing, 2017 IEEE International Conference on Robotics and Automation, 4116-4121, 2017.
- H. Nozaki and T. Sugihara, Switching technique of COM-navigation / foot-navigation controls for a biped robot that goes over various terrains, 2016 JSME Conference on Robotics and Mechatronics, 2A1-12b4, 2016.
- H. Atsuta and T. Sugihara, Dynamics Morphing between Standing and Repetitive Hopping of Biped Robots, 2015 IEEE International Conference on Robotics and Automation, 5704-5709, 2015.
- H. Atsuta and T. Sugihara, Sideward Locomotion Control of Biped Robots Based on Dynamics Morphing, 2014 IEEE/RSJ International Conference on Intelligent Robots and Systems, 959-964, 2014.
- Y. Ishiguro and T. Sugihara, Dynamic 3-dimensional Locomotion of a Humanoid Robot with Hand-foot Support Coordination, 2014 JSME Conference on Robotics and Mechatronics, 3P1-E06, 2014.
- T. Sugihara, Reflexive Step-out Control Superposed on Standing Stabilization of Biped Robots, 2012 IEEE-RAS International Conference on Humanoid Robots, 741-746, 2012.
- T. Sugihara, Biped Control To Follow Arbitrary Referential Longitudinal Velocity based on Dynamics Morphing, 2012 IEEE/RSJ International Conference on Intelligent Robots and Systems, 1892-1897, 2012.
- T. Sugihara, Consistent Biped Step Control with COM-ZMP Oscillation Based on Successive Phase Estimation in Dynamics Morphing, 2010 IEEE International Conference on Robotics and Automation, 4224-4229, 2010.
- T. Sugihara, Dynamics Morphing from Regulator to Oscillator on Bipedal Control, 2009 IEEE/RSJ International Conference on Intelligent Robots and Systems, 2940-2945, 2009.
- T. Sugihara, Standing Stabilizability and Stepping Maneuver in Planar Bipedalism based on the Best COM-ZMP Regulator, 2009 IEEE International Conference on Robotics and Automation, 1966-1971, 2009.
- T. Sugihara and Y. Nakamura, High Mobility Control of Humanoid Robots Based on an Analogy of ZMP-COG Model and Carted Inverted Pendulum Model (in Japanese), Journal of Robotics Society of Japan, 24(1):74-83, 2006.
- T. Sugihara, Y. Nakamura and H. Inoue, Realtime Humanoid Motion Generation through ZMP Manipulation based on Inverted Pendulum Control, 2002 IEEE International Conference on Robotics and Automation, 1404-1409, 2002.
|
|
State estimation of biped motion
We developed techniques to accurately estimate trunk inclination, translational movement and the COM movement of a humanoid robot based on information from inertial-force sensors and kinematic-dynamic models.
- K. Masuya and T. Sugihara, COM Motion Estimation of a Biped Robot Based on Kinodynamics and Torque Equilibrium, Advanced Robotics, 30(10):691-703, 2016.
- K. Masuya and T. Sugihara, Dead reckoning for biped robots that suffers less from foot contact condition based on anchoring pivot estimation, Advanced Robotics, 29(12):785-799, 2015.
|
|
|
Arm motion control
We developed a reaching controller with which the arm exhibits human-like smooth velocity profile and flexibly absorbs perturbations.
- F. Seto and T. Sugihara, Nonlinear Reference Shaping with Endpoint Position Feedback for Large Acceleration Avoidance in Reaching Movement, Journal of Robotics and Mechatronics, 22(2):173-178, 2010.
- F. Seto and T. Sugihara, Motion Control with Slow and Rapid Adaptation for Smooth Reaching Movement Under External Force Disturbance, 2010 IEEE/RSJ International Conference on Intelligent Robots and Systems, 1650-1655, 2010.
- F. Seto and T. Sugihara, Online Nonlinear Reference Shaping with End-point Position Feedback for Human-Like Smooth Reaching Motion, 2009 IEEE-RAS International Conference on Humanoid Robots, 297-302, 2009.
- F. Seto and T. Sugihara, Online Reference Shaping with End-point Position Feedback for Large Acceleration Avoidance on Manipulator Control, 2009 IEEE/RSJ International Conference on Intelligent Robots and Systems, 5743-5748, 2009.
|
|
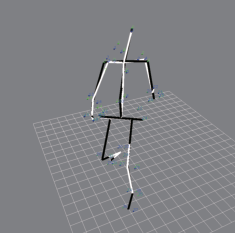
Accurate reproduction of original motion from captured data
We developed a technique to identify kinematics model and marker arrangements of the subject human from optical motion capture data and to estimate the whole-body motion accurately.
It especially works in complex joints such as shoulders.
- T. Zou and T. Sugihara, Toward on-line fitting of a human skeleton-marker model for accurate motion tracking, The 8th IEEE RAS/EMBS International Conference on Biomedical Robotics and Biomechatronics, pp. 219-224, 2020.
- T. Zou and T. Sugihara, Fast identification of a human skeleton-marker model for motion capture system using stochastic gradient descent method, The 8th IEEE RAS/EMBS International Conference on Biomedical Robotics and Biomechatronics, pp. 188-193, 2020.
|

|
Identification of standing controller
We hypothesized that the standing controller developed for a humanoid robot can model that of a human, and got supportive results by identifying controller parameters.
It works for evaluating abilities that are hard to be quantified such as equilibratory sense and reflex.
- N. Murai and T. Sugihara, Identification of COM Control Behavior of a Human in Stance as a Dynamical System, The 8th IEEE RAS/EMBS International Conference on Biomedical Robotics and Biomechatronics, pp. 95-100, 2020.
- D. Kaneta, N. Murai and T. Sugihara, Reassessment of COM-ZMP Model for the Identification of Lateral Standing Controller of a Human, 2013 IEEE/RSJ International Conference on Intelligent Robots and Systems, 2351-2356, 2013.
- N. Murai, D. Kaneta and T. Sugihara, Identification of a Piecewise Controller of Lateral Human Standing Based on Returning Recursive-Least-Square Method, 2013 IEEE/RSJ International Conference on Intelligent Robots and Systems, 96-101, 2013.
- D. Kaneta, N. Murai and T. Sugihara, Visualization and Identification of Macroscopic Dynamics of a Human Motor Control Based on the Motion Measurement, 2012 IEEE-RAS International Conference on Humanoid Robots, 767-772, 2012.
|
|
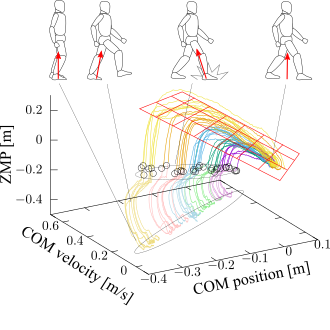
Identification of step-and-brake controller
We hypothesized the walking controller developed for a humanoid robot can model that of a human, and got supportive results through controller identifications.
The controller can be identified only from initiating movements, so that it works for design of walking-assistive devices.
- M. Kojima and T. Sugihara, Identification of a Step-and-Brake Controller of a Human Based on COM-ZMP Model and Terminal Capturability Condition, The 8th IEEE RAS/EMBS International Conference on Biomedical Robotics and Biomechatronics, pp. 165-170, 2020.
|

|
Behavior transition based on dynamics morphing
We proposed a framework with which the robot can autonomously transition behaviors based on the connectivity of dynamical systems representing each motion.
- H. Atsuta and T. Sugihara, Automatic Biped Motion Transition Based on Adjancency Relations of Dynamics Morphing Controllers, The 17th SICE System Integration Division Annual Conference, 1C3-4, 2016.
|
|
SLAM-SEAN
We proposed a concept of SEAN (Simultaneous Exploration And Navigation) to efficiently achieve a goal in an unknown environment and developed a combined system with SLAM (Simultaneous Localization And Mapping).
- J. Zuo, T. Yamamoto, T. Sugihara, SLAM-SEAN for Higher Autonomy of Mobile Robots in Unknown Environment, 2020 JSME Conference on Robotics and Mechatronics, 2P1-K15, 2020.
- M. Yamamoto and T. Sugihara, An Efficient Simultaneous Exploration and Navigation in An Unknown Environment of a Mobile Robot by Dynamic Update of Extremum-Free Potential Method, The 34th Annual Conference of The Robotics Society of Japan, 1C1-05, 2016.
|
|
Subsumptive biped locomotion control
We developed an autonomous biped locomotion controller in which observation, mapping, navigation and whole-body control concurrently run to improve robustness against dynamic changes of environments and perturbations.
- T. Yamamoto and T. Sugihara, Robust Path Planning for Biped Robots Against Variation of Surroundings and Goal, The 36th Annual Conference of The Robotics Society of Japan, 1J2-06, 2018.
- T. Yamamoto and T. Sugihara, Semi-autonomous Navigation of a Biped Robot Over Unlevel Terrain Based on the Combination of Discreate-Continuous Control, 22nd Robotics Symposia, 177-182, 2017.
- T. Yamamoto and T. Sugihara, Responsive Navigation of a Biped Robot On Elevation-Normal Terrain Map, The 35th Annual Conference of The Robotics Society of Japan, 3L2-02, 2017.
- T. Yamamoto and T. Sugihara, Robust Navigation System of a Biped Robot On the Combination of Responsive Discrete-Continuous Control, The 17th SICE System Integration Division Annual Conference, 1C3-3, 2016.
- H. Kobayashi and T. Sugihara, Self-consistent Automatic Navigation of COM and Feet for Realtime Humanoid Robot Steering, 2009 IEEE/RSJ International Conference on Intelligent Robots and Systems, 3525-3530, 2009.
|
|
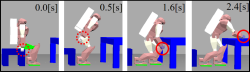
Fast planning of biped motions
We developed a fast planning method of biped motion trajectories based on an analytical solution of a differential equation based on the COM-ZMP model.
- T. Sugihara and Y. Nakamura, Boundary Condition Relaxation Method for Stepwise Pedipulation Planning of Biped Robots, IEEE Transaction on Robotics, 25(3):658-669, 2009.
- K. Yamamoto, T. Sugihara and Y. Nakamura, Gait Planning including Toe Contact with Boundary Condition Relaxation, The 17th CISM-IFToMM Symposium (RoManSy17), 409-416, 2008.
- T. Sugihara and Y. Nakamura, Enhancement of Boundary Condition Relaxation Method for 3D Hopping Motion Planning of Biped Robots, 2007 IEEE/RSJ International Conference on Intelligent Robots and Systems, 444-449, 2007.
- K. Terada, T. Sugihara and Y. Kuniyoshi, Online Gait Planning with Boundary Condition Relaxation and Dynamical 3D-Symmetrization, 25th Annual Conference of Robotics Society of Japan, 1G26, 2007.
|
|
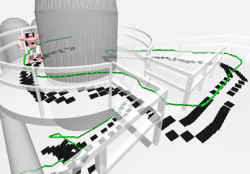
Path planning in complex environment
We developed a method to plan a locomotion path in a complex environment efficiently by adapting the search space to the local density of the environment.
- T. Nishi and T. Sugihara, Motion Planning of a Humanoid Robot in a Complex Environment Using RRT and Spatiotemporal Post-Processing Techniques, International Journal of Humanoid Robotics, 11(2):14410035-1-35, 2014.
- Y. Shimizu and T. Sugihara, Long-distance Path Planning for a Humanoid Robot in Large Scale Environment by Adaptive Complexity Method, 31th Annual Conference of Robotics Society of Japan, 1C1-08, 2013.
- Y. Shimizu and T. Sugihara, Efficient Path Planning of Humanoid Robots with Automatic Conformation of Body Representation to the Complexity of Environments, 2012 IEEE-RAS International Conference on Humanoid Robots, 755-760, 2012.
- Y. Shimizu and T. Sugihara, Local Collision Resolution in Two-Phase Path Planning for Humanoid Robots, 30th Memorial Conference of Robotics Society of Japan, 4K3-8, 2012.
|
|
Interactive motion design
We developed a technology to rapidly and interactively design dynamically consistent robot motions by automatically interpolating keyposes, where collisions with the environment and self-collisions are automatically resolved.
- K. Tanaka and T. Sugihara, Interactive Motion Design of an Anthropomorphic Robot represented by NURBS II: Fast Motion Design incorporated with 3-dimensional Contact with the Environment, The 34th Annual Conference of The Robotics Society of Japan, 3Y1-08, 2016.
- K. Tanaka and T. Sugihara, Interactive Motion Design of an Anthropomorphic Robot represented by NURBS I: Fast Motion Retouch to Satisfy ZMP Constraint based on Mathematical Structure of NURBS, The 34th Annual Conference of The Robotics Society of Japan, 3Y1-07, 2016.
- Y. Matsumoto and T. Sugihara, Auto-resolution of Collisions in Interactive Motion Design of a Humanoid Robot, 31th Annual Conference of Robotics Society of Japan, 1C3-05, 2013.
- Y. Matsumoto and T. Sugihara, Auto-resolution of Collisions for Interactive Posture Edit of a Humanoid Robot, 2013 JSME Conference on Robotics and Mechatronics, 2P1-A11, 2013.
- Y. Matsumoto and T. Sugihara, Auto-binding of Constraint Conditions for Interactive Motion Design of Humanoid Robots, 2012 JSME Conference on Robotics and Mechatronics, 1A2-O04, 2012.
|

|
Mimetic communication
We developed a non-verbal communication system between a human and a robot, in which the robot guesses an intention of the opposed person from his/her movement and responds to him/her at some-hundreds-of-millisecond cycle.
- W. Takano, K. Yamane, T. Sugihara, K. Yamamoto and Y. Nakamura, Theory of Communication between Human and Humanoid Robot based on Embodied Symbol Model (in Japanese), Journal of Robotics Society of Japan, 28(6):735-745, 2010.
- W. Takano, K. Yamane, T. Sugihara, K. Yamamoto and Y. Nakamura, Interactive Contents between a Human and a Robot Using Primitive Communication Model Based on Symbolizing Motion Patterns, The 2nd Digital Contents Symposium, 4-2, 2006.
- W. Takano, K. Yamane, T. Sugihara, K. Yamamoto and Y. Nakamura, Primitive Communication based on Motion Recognition and Generation with Hierarchical Mimesis Model, 2006 IEEE International Conference on Robotics and Automation, 3602-3609, 2006.
- T. Sugihara, W. Takano, K. Yamane, K. Yamamoto and Y. Nakamura, Online Dynamical Retouch of Motion Patterns Towards Animatronic Humanoid Robots, 2005 IEEE-RAS International Conference on Humanoid Robots, 117-122, 2005.
- T. Sugihara, K. Yamamoto, W. Takano, K. Yamane and Y. Nakamura, Animatronic Humanoid Robot System That Responsively Interacts with Humans, 36th International Symposium on Robotics, 2005.
|
|
Torque sensor
We developed a rather low-cost torque sensor comprising a torsion bar and some photosensors.
- T. Sugihara and T. Katoh, Torque sensor, Japanese Patent Public 2018-08-896.
- T. Kato, S. Ishikawa and T. Sugihara, Reduction of other-axis interference in torque sensing unit by a bearing, 2016 JSME Conference on Robotics and Mechatronics, 1A2-20a2, 2016.
- M. Nishio, S. Ishikawa and T. Sugihara, Low-cost Torque Sensor for Compensation of Gear Friction by Using Optical Sensor, 2015 JSME Conference on Robotics and Mechatronics, 2A1-B08, 2015.
|
|
Backdrivable motor control
We developed a motor control unit that is backdrivable and can flexibly absorb perturbations with friction compensation in a gear at about 100:1 reduction ratio.
- T. Kato and T. Sugihara, Variable loss-compensation control for flexible and accurate manipurator, 2019 JSME Conference on Robotics and Mechatronics, 2A2-C08, 2019.
- T. Sugihara and S. Ishikawa, Motor control device and motor controlling method, Japanese Patent Public 2014-163172.
- S. Ishikawa, M. Nishio and T. Sugihara, Low-cost Backdrivable Motor Control Based on Feed-forward/Feed-back Friction Compensation, 2015 IEEE International Conference on Robotics and Automation, 5026-5031, 2015.
|
|
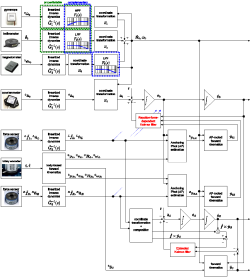
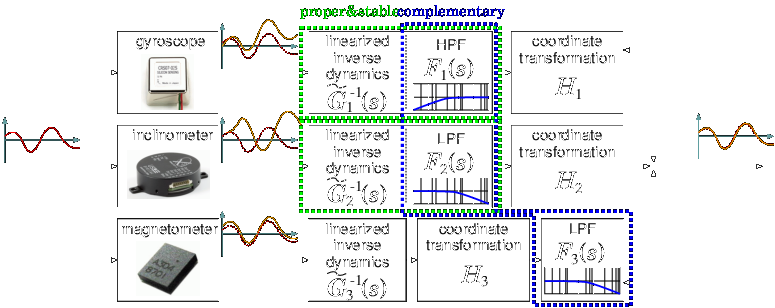
Fast and accurate attitude estimation
We developed a technique to estimate irregularly-changing attitude of a mobile craft accurately by complementarily combining a rate-gyroscope, an inclinometer and a magnetometer with their frequency responses compensated.
- K. Masuya and T. Sugihara, A Nonlinear Complementary Filter for Attitude Estimation with Dynamics Compensation of MARG Sensor,
2016 IEEE International Conference on Advanced Intelligent Mechatronics, 976-981, 2016.
- T. Sugihara, K. Masuya and M. Yamamoto, A Complementary Filter for High-fidelity Attitude Estimation based on Decoupled Linear / Nonlinear Properties of Inertial Sensors (in Japanese), Journal of the Robotics Society of Japan, 31(3):251-262, 2013.
- T. Sugihara and K. Masuya, Attitude estimation machine, Japanese Patent Public 2012-198057.
- K. Masuya, T. Sugihara and M. Yamamoto, Design of Complementary Filter for High-fidelity Attitude Estimation based on Sensor Dynamics Compensation with Decoupled Properties, 2012 IEEE International Conference on Robotics and Automation, 606-611, 2012.
|
|
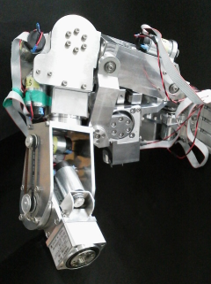
Anthropomorphic upperarm mechanism
We developed an upperarm mechanism that mimics complex movements of the shoulder joint with rather simple constitution.
- T. Teramoto and T. Sugihara, 5-DOF Anthropomorphic Shoulder Mechanism Compromising Support Stiffness and Workspace, 2015 JSME Conference on Robotics and Mechatronics, 1P2-C03, 2015.
|

|
Waist joint mechanism
We developed a parallel mechanism with high durability against payload and mobility.
It is in theory with zero degree-of-freedom but in practice movable in two directions.
- M. Kageyama and T. Sugihara, Kinematics Computation of a Mobile Zero-DOF Mechanism with Neural Network, 2019 JSME Conference on Robotics and Mechatronics, 2A2-F07, 2019.
- T. Sugihara and J. Noumi, Mobility Analysis of Zero-DOF Mechanism That Moves, 23rd Robotics Symposia, 85-90, 2018.
- K. Shimoguchi and T. Sugihara, Reduction of Backlash of the 3-UU Parallel Mechanism, 2016 JSME Conference on Robotics and Mechatronics, 2P2-13b2, 2016.
- K. Shikata, K. Masuya and T. Sugihara, Zero-DOF 3-UU parallel mechanism that inclines largely in two directions, 2014 JSME Conference on Robotics and Mechatronics, 3P2-K02, 2014.
|

|
Anthropomorphic lower-leg complex mechanism
We developed a lower-leg complex mechanism that naturally changes the reduction ratio along with the postural change as to behave stiffly in stance phase and flexibly in swing phase.
- T. Suzue and T. Sugihara, Lower leg mechanism for humanoid robots that enables natural transition between resistive/compliant behaviors to gravity and ankle pronation/supination, 2019 JSME Conference on Robotics and Mechatronics, 1A1-J05, 2019.
- N. Higashida, K. Masuya and T. Sugihara, Variable transmission mechanism with coupled joints, Japanese Patent Public 2015-098610.
- N. Higashida, K. Masuya and T. Sugihara, An Anthropomorphic Lower Leg Mechanism with Variable Transmission by Engaged Knee-Ankle Joints, 2015 JSME Conference on Robotics and Mechatronics, 2A2-P08, 2015.
|

|
Robot foot mechanism
We developed a foot mechanism consisting of rigid parts that zeroes impacts at touchdown and rapidly regains stiffness after that.
- M. Yamasaki and T. Sugihara, Effect of Plastic Deformation on Foot Mechanism That Enables Impact Absorption and Stable Support, 2014 JSME Conference on Robotics and Mechatronics, 1A1-R01, 2014.
- M. Yamasaki and T. Sugihara, Foot Mechanism for a Humanoid Robot That Enables Impact Absorption and Steady Support, 2013 JSME Conference on Robotics and Mechatronics, 1A2-P06, 2013.
|
|
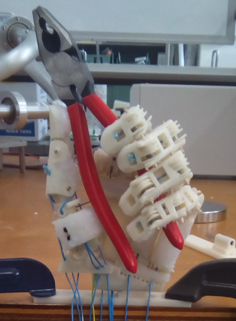
Anthropomorphic hand mechanism
We developed a five-fingered anthropomorphic hand mechanism that enables grasping and in-hand manipulation of complex objects.
The most-likely joint assignment was identified through motion measurement.
- H. Tani, R. Nozawa and T. Sugihara, Identification of a Human Hand Kinematics by Measuring and Merging of Nail-Based Finger Motions, 2020 IEEE/RSJ International Conference on Intelligent Robots and Systems, pp.9220-9225, 2020.
- H. Tani, R. Nozawa and T. Sugihara, Development and Evaluation of Robot Hand Mechanism That Reproduces Human Motion Characteristics, 2019 JSME Conference on Robotics and Mechatronics, 2A2-G09, 2019.
- H. Tani and T. Sugihara, Nail-Position-Based Identification of Joint Assignment of a Human Hand through Motion Measurement, The 36th Annual Conference of The Robotics Society of Japan, 1B1-01, 2018.
- H. Tani and T. Sugihara, Kinematics identification of CMC joint of a human thumb toward mechanical design of an anthropomorphic robot hand, 2017 JSME Conference on Robotics and Mechatronics, 2P1-D10, 2017.
|

|
I joined projects to build life-sized humanoid robots H5, H6 and H7 (from left to right).
- S. Kagami, K. Nishiwaki, J. J. Kuffner, T. Sugihara, M. Inaba and H. Inoue, Design, Implementation and Remote Operation of the Humanoid H6, In Experimental Robotics VII, Lecture Notes in Control and Information Sciences 271, 41-50, Springer-Verlag., 2001.
- S. Kagami, J. J. Kuffner, K. Nishiwaki, T. Sugihara, T. Michikata, T. Aoyama, M. Inaba and H. Inoue, Design and Implementation of Remotely Operation Interface for Humanoid Robot, 2001 IEEE International Conference on Robotics and Automation, 401-406, 2001.
- S. Kagami, K. Nishiwaki, T. Sugihara, J. J. Kuffner, M. Inaba and H. Inoue, Design and Implementation of Software Research Platform for Humanoid Robotics : H6, 2001 IEEE International Conference on Robotics and Automation, 2431-2436, 2001.
- K. Nishiwaki, T. Sugihara, S. Kagami, F. Kanehiro, M. Inaba and H. Inoue, Design and Development of Research Platform for Perception-Action Integration in Humanoid Robot : H6, 2000 IEEE/RSJ International Conference on Intelligent Robots and Systems, 1559-1564, 2000.
- K. Nagasaka, A. Konno, K. Nishiwaki, T. Kitagawa, T. Sugihara, M. Inaba and H. Inoue, Development of Dynamic Humanoid H5, 16th Annual Conference of Robotics Society of Japan, 837-838, 1998.
|

|
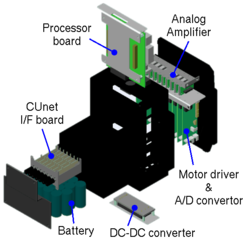
We developed miniature humanoid robots mighty (left) and magnum (right) with a portable robot control unit AnimatoCore.
- T. Sugihara, K. Yamamoto and Y. Nakamura, Hardware design of high performance miniature anthropomorphic robots, Robotics and Autonomous System, 56(1):82-94, 2007.
- T. Sugihara, K. Yamamoto and Y. Nakamura, Architectural Design of Miniature Anthropomorphic Robots Towards High-Mobility, 2005 IEEE/RSJ International Conference on Intelligent Robots and Systems, 1083-1088, 2005.
|
|
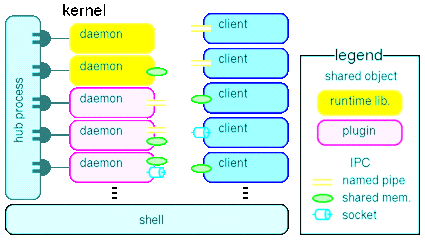
We proposed a software framework that can be easily enhanced, where plug-in architecture is employed and accessibility to the unique robot data is adjustable according to functions.
- T. Sugihara, Growing Robot Software Architecture based on Microkernel Emulation, JSME Annual Conference on Robotics and Mechatronics, 2P1-F05, 2008.
|