

丂偙偺婎斅偼丄桳彏偱攝晍偲側偭偰偄傑偡丅壙奿偵偮偄偰偼丄俰俙俀俻倃倄乮愳懞俷俵乯偝傫偵偍恞偹偔偩偝偄丅
丂側偍丄傑偩傑偩丄徯夘偱偒偰偄側偄晹暘傕偁傝傑偡偑丄帍忋偺搒崌忋丄怽偟栿偁傝傑偣傫丅
丂偙偺儘乕僥乕僞僐儞僩儘乕儔傪攝晍偟偰捀偒丄偲偭偰傕姶幱偟偰偄傑偡丅JA2QXY乮愳懞俷俵乯偝傫丄杮摉偵偁傝偑偲偆偛偞偄傑偟偨丅
丂偖傞偖傞夞偟偰丄QSO傪妝偟傫偱偄傑偡丅奆偝傫傕擛壗偱偡偐丅
儘乕僥乕僞僐儞僩儘乕儔乮俛y丂俰俙俀俻倃倄乮愳懞俷俵乯乯
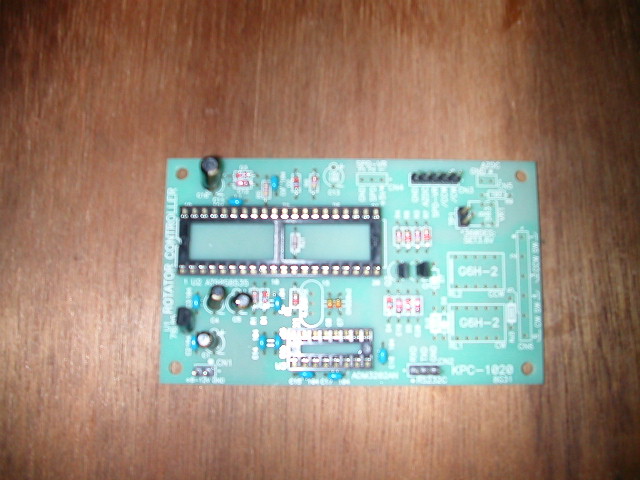
丂俰俙俀俻倃倄乮愳懞O俵乯偝傫偐傜儘乕僥乕僞僐儞僩儘乕儔乕偺攝晍傪庴偗傑偟偨丅偙偺儘乕僥乕僞僐儞僩儘乕儔偵偮偄偰偛徯夘偟傑偡丅
丂採嫙偝傟傞婎斅偼嵍偺幨恀偺婎斅傕偺偲側傝丄栜榑丄婎杮晹暘偺俬俠摍偵偮偄偰傕幚憰偝傟傑偡丅
丂偨偩偟丄儘乕僥乕僞偺婡庬偵傛偭偰偼丄幚憰偝傟傞晹昳丄偦偺懠偺夵憿偑敽偆偙偲偐傜丄婎杮晹暘埲奜偺晹昳丄夵憿偑昁梫偵側偭偰偒傑偡丅
丂 俀侽侽俉擭僴儉僼僃傾偺俿俧俠乮僩僢僾僈儞僋儔僽乯偱徯夘偟偨傕偺偱偡丅
丂偙傟偼丄憖嶌偡傞僷僜僐儞夋柺偲傾僾儕僜僼僩僂僃傾偲儘乕僥乕僞僐儞僩儘乕儔杮懱傪僀儞僞乕僼僃乕僗偡傞僴乕僪僂僃傾偱峔惉偝傟偰偄傑偡丅僷僜僐儞偲僀儞僞乕僼僃乕僗偼俼俽亅俀俁俀俠偱愙懕偟偰偄傑偡丅
丂憗懍丄峕杮偺僐儞僩儘乕儔杮懱偵俼俽亅俀俁俀俠偺俢亅俽倀俛僐僱僋僞乕傪庢晅偗丄婎斅傪幚憰偟傑偟偨丅
丂峕杮偺僐儞僩儘乕儔杮懱偺屻傠斅偼揝斅偱寠偁偗偼偲偭偰傕嬯楯偟傑偟偨丅俫俬両両
丂俢亅俽倀俛僐僱僋僞乕傪庢晅偗丄婎斅傪幚憰偡傟偽丄屻偼攝慄偺傒偲側傝傑偡偑丄摉曽偼俼俤俵俷俿俤抂巕偲僷儔儗儖偵愙懕偟傑偟偨丅
丂側偍丄偙偺婎斅偼帋嶌婎斅偱偁傝傑偡偑丄栤戣側偔摦嶌偟偰偍傝傑偡丅


丂偝偰丄杮憰抲偺巊梡姶偱偁傝傑偡偑丄偦偺慜偵戝帠側偙偲偑偁傝傑偡丅偦傟偼丄弶婜愝掕偱偡丅俠俷俵億乕僩偺愝掕丄儘乕僥乕僞偺僗僞乕僩埵抲偺愝掕丄夞揮妏偺愝掕丄僞僀僩儖夋柺偺愝掕偱偡丅
丂愝掕帺恎偼偲偭偰傕娙扨偱丄庢埖愢柧彂傕揧晅偝傟偰偍傝丄偦偺庢埖愢柧彂捠傝偵愝掕偡傟偽丄摦嶌偡傞傛偆偵側傝傑偡丅
丂庒姳丄柺搢側愝掕偼丄儘乕僥乕僞埵抲偺愝掕偱偁傝傑偡偑丄偙傟傕丄儘乕僥乕僞偺夞揮妏偵懳偡傞揹埑傪婰榐偟丄偁傜偐偠傔丄撪晹僨乕僞偺僥乕僽儖偵彂偒崬傓嶌嬈偱偡丅偙偺愝掕偼堦搙愝掕偡傟偽丄屻偼栤戣側偔摦嶌偟傑偡丅
丂偨偩偟丄儘乕僥乕僞偵傛偭偰偼丄揹埑曄摦傗埵抲揹埑攔弌倁俼偺曄摦偵傛傝丄僥乕僽儖僨乕僞傪挻偊傞晄帺慠側摦偒傪偡傞応崌偑偁傞偦偆偱偡丅
丂
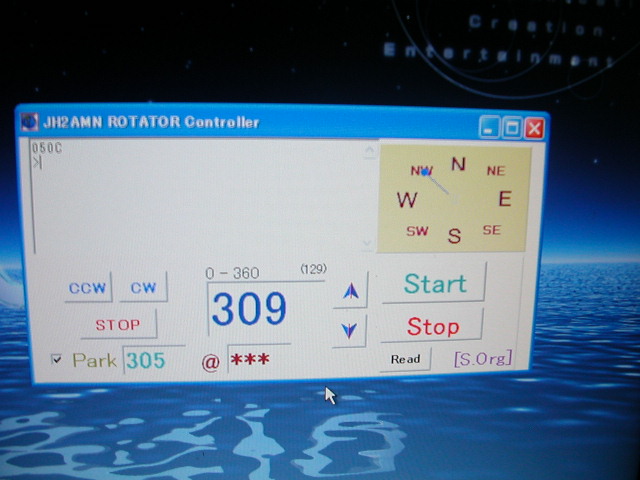
丂愝掕偑廔傢傝丄俹俠傪棫偪忋偘傞偲師偺傛偆側夋柺偑棫偪忋偑偭偰偒傑偡丅
丂愭傎偳傕偛徯夘偟偨傛偆偵丄奺庬愝掕偑偁傞栿偱偡偑丄偦偺愝掕偺偆偪丄僞僀僩儖夋柺偺愝掕傪偟傑偡偲丄夋柺偐傜傕偍暘偐傝偵側傞傛偆偵丄俰俫俀俙俵俶丂俼俷俿俙俿俷俼丂俠倧値倲倰倧倢倢倕倰偲帺暘偩偗偺僆儕僕僫儖側暥帤傪愝掕偱偒傑偡丅栜榑娍帤傕俷俲偱偡丅
丂
丂偝偰丄夋柺偺愢柧傪偟傑偡丅
丂夋柺偺昞帵偺岦偐偭偰塃抂忋偼傾儞僥僫偺曽岦傪昞偟偰偄傑偡丅偙傟偱偼丄戝懱偺妏搙偟偐暘偐傝傑偣傫偑丄恀傫拞晅嬤偵仐仏仏仏偲昞帵偝傟偰偄傑偡偑丄偙傟偑丄愝掕偟偨帪揰偱偺尰嵼曽埵妏搙傪昞帵偟傑偡乮崱丄僐儞僩儘乕儖傪偟偰偄側偄偺偱丄仏仏仏偵側偭偰偄傑偡乯丅傑偨丄偦偺忋偺彫憢偼栚昗曽埵妏搙偵側傝傑偡丅栜榑丄昞帵偼尰嵼偺曽埵妏搙傪昞帵偟偰偄傑偡丅
丂
妏搙愝掕偼丄彫憢偱偺愝掕丄塃抂忋偺N-E-S-W偺夋柺忋偱傕愝掕偱偒傑偡偺偱丄偲偭偰傕曋棙偱偡丅
丂摿偵丄傾儞僥僫傪偄偮傕摨偠曽岦偵巭傔偰抲偒偨偄応崌丄夋柺岦偐偭偰嵍抂壓偺俹ark偺彫憢偵巭傔偰抲偒偨偄妏搙傪愝掕偟偰偍偗偽丄偙偺傾僾儕働乕僔儑儞傪廔椆偡傞慜偵丄愝掕偟偨妏搙傑偱夞揮偟丄傾僾儕働乕僔儑儞偑暵偠傞傛偆偵側偭偰偄傑偡丅偙傟偼偲偭偰傕曋棙偱偡傛乮巹偺応崌偼僋儔儞僋傾僢僾僞儚乕側偺偱偙偺婡擻偼偲偭偰傕婥偵擖偭偰偄傑偡乯丅